וואָס איז און ווי אַדאַפּטיוו סאַספּענשאַן אַרבעט
צופרידן
איין וועג צו פֿאַרבעסערן אַ מאַשין ס סאַספּענשאַן איז צו אַדאַפּט עס צו די נאַטור פון די וועג, גיכקייַט אָדער דרייווינג סטיל. עס איז מעגלעך צו ינסטרומענט דעם מיט די נוצן פון עלעקטראָניש ויסריכט און הויך-גיכקייַט ילעקטראָומאַגנעטיק, פּנעוומאַטיש און הידראַוליק אַקטוייטערז. דער זעלביקער מאַשין, מיט אַ שנעל ענדערונג אין סאַספּענשאַן קעראַקטעריסטיקס, קענען קריגן יחיד אַבילאַטיז פון אַ וועג ספּאָרט מאַשין, סווו אָדער ליכט טראָק. אָדער פשוט באטייטיק פֿאַרבעסערן פּאַסאַזשיר טרייסט.
יסודות פון אָרגאַנייזינג אַדאַפּטיישאַן
צו באַקומען די פיייקייט צו אַדאַפּט צו פונדרויסנדיק ינפלואַנסיז אָדער שאָפער קאַמאַנדז, די סאַספּענשאַן מוזן קריגן אַן אַקטיוו כאַראַקטער. פּאַסיוו מעקאַניזאַמז שטענדיק אַניקוויוואַקאַלי רעאַגירן צו זיכער ינפלואַנסיז. אַקטיוו אָנעס זענען ביכולת צו טוישן זייער קעראַקטעריסטיקס. צו טאָן דאָס, זיי האָבן אַ קאָנטראָל עלעקטראָניש אַפּאַראַט, וואָס איז אַ קאָמפּיוטער וואָס קאַלעקץ אינפֿאָרמאַציע פון סענסאָרס און אנדערע פאָרמיטל סיסטעמען, באַקומען ינסטראַקשאַנז פון די שאָפער און, נאָך פּראַסעסינג, שטעלן די מאָדע צו די אַקטוייטערז.

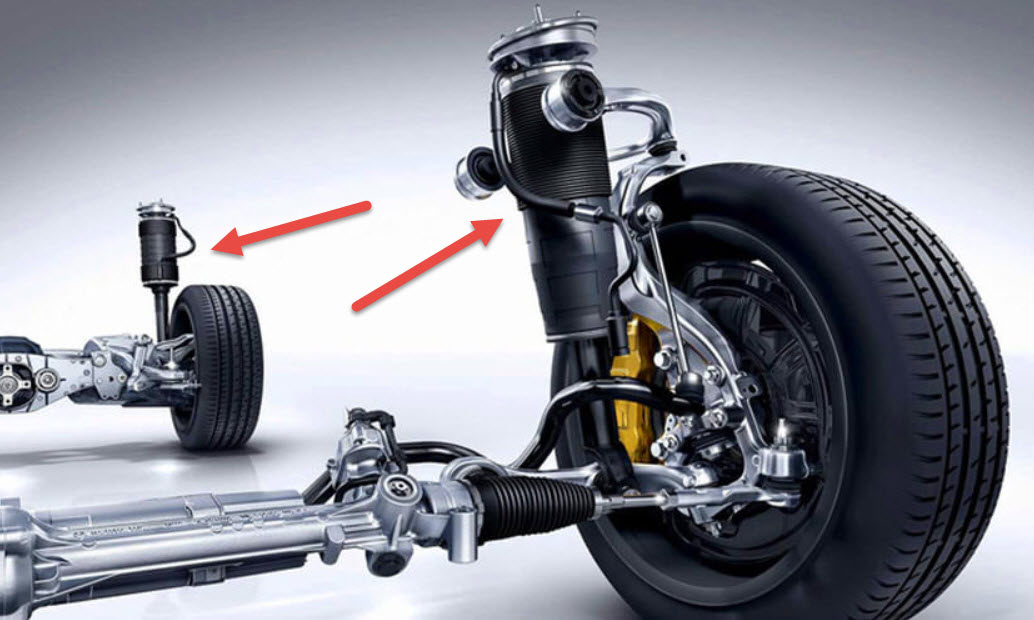
ווי איר וויסן, די סאַספּענשאַן באשטייט פון גומע עלעמענטן, דאַמפּינג דעוויסעס און אַ פירן וויין. טהעאָרעטיקאַללי, עס איז מעגלעך צו קאָנטראָלירן אַלע די קאַמפּאָונאַנץ, אָבער אין פיר עס איז גאַנץ גענוג צו טוישן די פּראָפּערטיעס פון דאַמפּערז (קלאַפּ אַבזאָרבערז). דאָס איז לעפיערעך גרינג צו טאָן מיט פּאַסיק פאָרשטעלונג. כאָטש אויב דער אָפּרוף גיכקייַט איז נישט פארלאנגט, למשל, די פּאַרקינג מאָדע, די ענדערונג אין ערד רעשוס אָדער סטאַטיק סטיפנאַס זענען אונטערטעניק צו אַדזשאַסטמאַנץ, עס איז גאַנץ מעגלעך צו אַדאַפּט די סאַספּענשאַן קאַנפיגיעריישאַן פֿאַר אַלע זייַן קאַמפּאָונאַנץ.
פֿאַר אַפּעריישאַנאַל אַדאַפּטיישאַן, עס וועט זיין נייטיק צו נעמען אין חשבון פילע אַרייַנשרייַב פּאַראַמעטערס:
- דאַטן אויף ירעגיאַלעראַטיז פון וועג ייבערפלאַך, ביידע קראַנט און אַפּקאַמינג;
- באַוועגונג גיכקייַט;
- ריכטונג, וואָס איז, די ווינקל פון ראָוטיישאַן פון די סטירד ווילז און די ווינקלדיק אַקסעלעריישאַן פון די מאַשין ווי אַ גאַנץ;
- שטעלע און גיכקייַט פון ראָוטיישאַן פון די סטירינג ראָד;
- דריווערס רעקווירעמענץ לויט צו די אַנאַליסיס פון זיין דרייווינג סטיל, ווי געזונט ווי יענע אריין אין מאַנואַל מאָדע;
- די שטעלע פון דעם גוף קאָרעוו צו די וועג, די פּאַראַמעטערס פון זייַן טוישן איבער צייַט;
- ראַדאַר-טיפּ סענסער סיגנאַלז וואָס אַנאַלייז די צושטאַנד פון די קאַווערידזש אין פראָנט פון די מאַשין;
- לאַנדזשאַטודאַנאַל און טראַנזווערס אַקסעלעריישאַנז פון די מאַשין, מאָטאָר און ברייקינג סיסטעם אַפּערייטינג מאָדעס.
די קאָנטראָל בלאָק פּראָגראַם כּולל אַלגערידאַמז פֿאַר ריספּאַנדינג צו אַלע ינקאַמינג סיגנאַלז און פֿאַר אַקיומיאַלייטינג אינפֿאָרמאַציע. קאַמאַנדז זענען טיפּיקלי געשיקט צו די ילעקטריקאַל קאַנטראָולד קלאַפּ אַבזאָרבערז פון אַלע ווילז, ינדיווידזשואַלי פֿאַר יעדער, ווי געזונט ווי צו די אַקטיוו קאַפּלינגז פון אַנטי-ראָלל באַרס. אָדער צו דעוויסעס וואָס פאַרבייַטן זיי ווען ארבעטן ווי אַ טייל פון גאָר הידראַוליק קאַנטראָולד סאַספּענשאַנז, ווי געזונט ווי די מערסט הויך-טעק פּראָדוקטן וואָס אַרבעט אויסשליסלעך אויף ילעקטראָומאַגנעטיק ינטעראַקשאַן. אין די לעצטע פאַל, די גיכקייַט פון ענטפער איז אַזוי הויך אַז כּמעט ידעאַל נאַטור קענען זיין אַטשיווד דורך די אָפּעראַציע פון די סאַספּענשאַן.
סיסטעם זאַץ
דער קאָמפּלעקס כולל דעוויסעס וואָס ינשור די רעגולירן פון דאַמפּינג פּראָפּערטיעס און דינאַמיש סטיפנאַס, ווי געזונט ווי מינאַמייזינג גוף זעמל:
- סאַספּענשאַן קאָנטראָללער מיט מייקראָופּראַסעסער, זכּרון און איך / אָ סערקאַץ;
- אַקטיוו מעקאַניזאַמז פֿאַר פּאַריינג זעמל (קאַנטראָולד אַנטי-זעמל באַרס);
- קאָמפּלעקס פון סענסאָרס;
- קלאַפּ אַבזאָרבערז אַז לאָזן עלעקטראָניש קאָנטראָל פון סטיפנאַס.
די דאַשבאָרד קאָנטראָלס, רובֿ אָפט דאָס איז אַן אויף-ברעט ינטעראַקטיוו אַרויסווייַזן, דער שאָפער קענען שטעלן איינער פון די אַפּערייטינג מאָדעס לויט צו זיין פּרעפֿערענצן. פּרידאַמאַנאַנס פון טרייסט, ספּאָרטי אָדער אַוועק-וועג פיייקייט איז ערלויבט, ווי געזונט ווי מער אַוואַנסירטע קוסטאָמיזאַטיאָן פון פאַנגקשאַנז מיט מאָדע זכּרון. די אַקיומיאַלייטיד אַדאַפּטיישאַן קענען זיין גלייך באַשטעטיק צו דער אָריגינעל סעטטינגס.

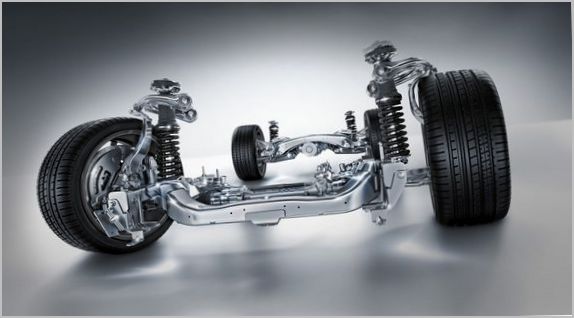
רעקווירעמענץ פֿאַר טראַנזווערס סטייבאַלייזערז זענען שטענדיק קאָנטראָווערסיאַל. אויף די איין האַנט, זייער ציל איז צו ענשור מינימאַל גוף זעמל. אבער אין דעם וועג די סאַספּענשאַן אַקווייערז די כאַראַקטער פון אָפענגיקייַט, וואָס מיטל טרייסט איז רידוסט. ווען דרייווינג אויף שלעכט ראָודז, אַ מער ווערטפול שטריך וועט זיין אפילו מער פרייהייט פון יחיד ווילז צו דערגרייכן מאַקסימום אַרטיקולאַטיאָן פון די אַקסאַלז. בלויז אין דעם וועג, אַלע סאַספּענשאַן רייזע ריזערווז וועט זיין גאָר געניצט צו ענשור קעסיידערדיק קאָנטאַקט פון די טירעס מיט די קאָוטינג. א סטייבאַלייזער מיט קעסיידערדיק סטיפנאַס, וואָס איז יוזשאַוואַלי אַ פּשוט באַר פון פרילינג שטאָל, ארבעטן אויף דעם פּרינציפּ פון אַ טאָרסיאָן באַר, וועט נישט קענען צו דינען גלייַך געזונט אין אַלע באדינגונגען.
אין אַקטיוו סאַספּענשאַנז, די סטייבאַלייזער איז שפּאַלטן, מיט די מעגלעכקייט פון עלעקטראָניש רעגולירן. פאַרשידענע פּרינסאַפּאַלז קענען זיין געניצט צו קאָנטראָלירן די רידוסט סטיפנאַס. עטלעכע מאַניאַפאַקטשערערז נוצן אַ פּרעלאָאַד פֿאַר טוויסטינג דורך אַ עלעקטריק מאָטאָר מיט אַ גירבאַקס, אנדערע נוצן אַ הידראַוליק אופֿן, ינסטאָלינג הידראַוליק סילינדערס אויף די סטייבאַלייזער אָדער זייַן אַטאַטשמאַנט צו דעם גוף. עס איז אויך מעגלעך צו גאָר נאָכמאַכן די סטייבאַלייזער באַר מיט יחיד הידראַוליק סילינדערס אַפּערייטינג אין פּאַראַלעל מיט די גומע עלעמענטן.
אַדזשאַסטאַבאַל קלאַפּ אַבזאָרבערז
א קאַנווענשאַנאַל קלאַפּ אַבזאָרבער האט די פאַרמאָג פון טשאַנגינג זייַן דינאַמיש סטיפנאַס דיפּענדינג אויף די גיכקייַט און אַקסעלעריישאַן פון די רוט באַוועגונג. דעם איז אַטשיווד דורך אַ סיסטעם פון גערגל וואַלווז דורך וואָס דאַמפּינג פליסיק פלאָוז.
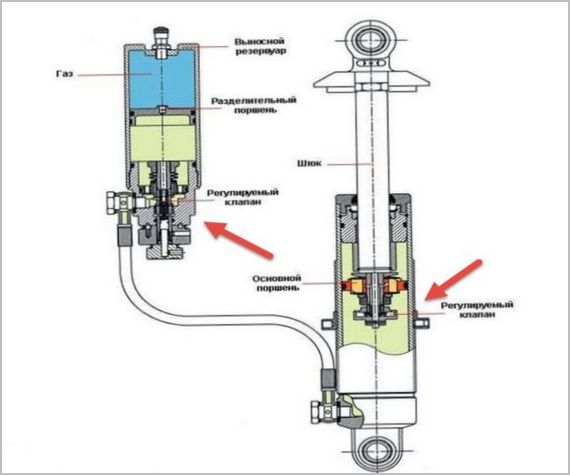
פֿאַר אַפּעריישאַנאַל קאָנטראָל פון בייפּאַס טראָטטאַלז, צוויי וועגן זענען מעגלעך - ינסטאָלינג שפּולקע-טיפּ ילעקטראָומאַגנעטיק וואַלווז אָדער טשאַנגינג די פּראָפּערטיעס פון די פליסיק אין אַ מאַגנעטיק פעלד. מאַניאַפאַקטשערערז נוצן ביידע מעטהאָדס, די רגע ווייניקער אָפט, ווייַל עס וועט דאַרפן אַ ספּעציעל פליסיק וואָס ענדערונגען זייַן וויסקאָסיטי אין אַ מאַגנעטיק פעלד.
די הויפּט אַפּעריישאַנאַל דיפעראַנסיז פון אַדאַפּטיוו סאַספּענשאַנז
אַקטיוו סאַספּענשאַנז מיט אַדאַפּטיישאַן פאַרמאָג צושטעלן די פיייקייט צו פּראָגראַממאַטיק קאָנטראָלירן די קאַנסומער קוואַלאַטיז פון אַ מאַשין אויף קיין וועג:
- דער גוף שטענדיק האלט אַ געגעבן שטעלע קאָרעוו צו די וועג, דיווייישאַנז פון וואָס זענען באשלאסן בלויז דורך די גיכקייַט פון די אַדאַפּטיישאַן סיסטעם;
- די ווילז האָבן די מאַקסימום אַטשיוואַבאַל קעסיידערדיק קאָנטאַקט מיט די קאָוטינג;
- די מדרגה פון אַקסעלעריישאַן אין דער כאַטע פון באַמפּס איז פיל נידעריקער ווי מיט אַ טראדיציאנעלן סאַספּענשאַן, וואָס ינקריסיז די טרייסט פון די יאַזדע;
- די מאַשין איז בעסער קאַנטראָולד און מער סטאַביל אין הויך ספּידז;
- די מערסט אַוואַנסירטע סיסטעמען קענען פאָרויסזאָגן באַמפּס דורך סקאַנינג די וועג פאָרויס פון די ווילז און סטרויערן די דאַמפּערז אין שטייַגן.
די כיסאָרן, ווי מיט אַלע קאָמפּלעקס סיסטעמען, איז איינער - הויך קאַמפּלעקסיטי און די פֿאַרבונדן רילייאַבילאַטי און פּרייַז ינדיקאַטאָרס. דעריבער, אַדאַפּטיוו סאַספּענשאַנז זענען געניצט אין די פּרעמיע אָפּשניט אָדער ווי אַפּשאַנאַל ויסריכט.
אַלגערידאַמז פון אַרבעט און אַ סכום פון ויסריכט זענען קעסיידער מער קאָמפּליצירט און ימפּרוווד. דער הויפּט ציל פון דיוועלאַפּמאַנץ אין די פעלד פון אַקטיוו אַדאַפּטיוו סאַספּענשאַנז איז צו דערגרייכן מאַקסימום מנוחה פון די מאַשין גוף, קיין ענין וואָס כאַפּאַנז מיט די ווילז און די פֿאַרבונדן אַנספּרינגען מאסע. אין דעם פאַל, אַלע פיר ווילז מוזן קעסיידער האַלטן קאָנטאַקט מיט די וועג, האַלטן די מאַשין אויף אַ געגעבן טרייַעקטאָריע.